

Descripción del proyecto
La propuesta de tecnología consiste en un dispensador que puede ser utilizado tanto para comida como para pelotas, canicas...
Se trata de una rampa que, gracias a unos sensores, detectará si hay objectos o no en ella y así se podrá regular una barrera para dejarlos pasar. También, una vez se alcance la capacidad máxima de almacenamiento, la barrera se bloqueará, deteniendo cualquier cosa que circule.
Materiales utilizados
2 sensores ultrasónicos (SR04)
1 servomotor
1 placa Arduino UNO
17 cables
1 cable con puerto USB



Explicación de los materiales
A continuación hay una descripción de cada componente utilizado y también una breve explicación de cómo debe conectarse.

Placa Arduino UNO
Placa electrónica de código abierto que se puede programar y dar todo tipo de usos. Está formada por diversas partes como los pines de entrada, salida o alimentación. Los pines de entrada son con los que podemos hacer lecturas. Estos son tanto los digitales (0-13) como los analógicos (A0-A5). Los pines de salida nos sirven para enviar señales como encender un led o un servomotor y son los digitales (0-13). También hay otros como GND, que es el de masa, el de 5V y 3.3V, que dan vueltas a la placa, y otros como TX, RX o Vin. Por último hay un botón para reiniciar.
Protoboard
Una protoboard consiste en una tabla con perforaciones donde se colocan los componentes electrónicos. Sus filas están conectadas de manera vertical y las cuatro restantes que se encuentran en la parte superior e inferior están conectadas horizontalmente. Estas últimas sirven para dar corriente (GND y CCV).


Resistencia
La resistencia es la oposición o dificultad en el paso de la corriente eléctrica. Cuanto más se opone un elemento de un circuito al que pase por la corriente, más resistencia tendrá.
Se mide en Ohms (Ω) y se representa con la R.
Diodo Led
Un diodo Led sólo permite el paso de corriente en un único sentido. Cuando se conecta un diodo en el sentido que permite el paso del corriente se dice que está polarizado directamente.
Por tanto, un diodo Led es un diodo que cuando está polarizado directamente emite luz.


Servomotor
Un servomotor es un motor eléctrico al que podemos controlar tanto la velocidad como la posición del eje que gira. Está compuesto por un motor eléctrico, un sistema de regulación, un sistema de control o sensor y un potenciómetro y suele girar hasta 180º.
Su conexión se hace mediante 3 cables:
Un cable Rojo: lo positivo
Un cable Negro: el negativo o GND.
Un cable Blanco: que es el que envía la señal para comunicar el ángulo en el que debe posicionarse según el pulso.
Sensor ultrasónico
Es un dispositivo que puede medir la distancia a un objeto mediante el uso de ondas de sonido.
El sensor mide la distancia enviando una onda de sonido y escuchándola de vuelta al rebotar en el objeto. El sensor determina la distancia que hay hasta el objeto con la medición del lapso de tiempo entre el envío y la recepción de los polos ultrasónicos. También se puede calcular con la fórmula:
L = ½ × T ×C.

Montaje
Primero de todo se conecta un pin al positivo (5 volteos) y otro al negativo (GND) de la placa a la Protoboard.
Servo: 3 cables
- 1 pin al positivo (Protoboard)
- 1 pin al negativo (Protoboard)
- 1 pin digital a la placa ( en este caso hemos usado el 8)
1r sensor: 4 cables
- 1 pin al positivo (Protoboard)
- 1 pin al negativo (Protoboard)
- Trigger: pin digital (en este caso el 2)
- Echo: pin digital (en este caso el 3)
2o sensor: 4 cables
- 1 pin al positivo (Protoboard)
- 1 pin al negativo (Protoboard)
- Trigger: pin digital (en este caso el 7)
- Echo: pin digital (en este caso el 6)
1r led: 1-2 cables
- Ánodo: pin digital (en este caso el 10)
- Cátodo: Resistencia y pin negativo (Protoboard)
2o led: 1-2 cables
- Ánodo: pin digital (en este caso el 12)
- Cátodo: Resistencia y pin negativo (Protoboard)

Programación
long cm = 0;
long cm2=0; //se declara que cm es una unidad de medida
int led=10;
int led2=12; // los pins 10 y 12 en la placa pertenecen a los leds
#include <Servo.h>
Servo myServo; //se incluye el servo y se le pone nombre
void setup()
{
Serial.begin(9600);
myServo.attach(8);
myServo.write(0);
pinMode(led,OUTPUT);
pinMode(led2,OUTPUT); //los leds son de salida
}
void loop()
{
cm =readUltrasonicDistance(2, 3); //cm leerá la distancia del primer sensor
Serial.print("Sensor 1:");
Serial.print(cm);
Serial.println("cm"); //se imprimen los cm
cm2 =readUltrasonicDistance2(7, 6); //cm2 leerá la distancia del segundo sensor
Serial.print("Sensor 2:");
Serial.print(cm2);
Serial.println("cm"); //imprime la distancia en cm
//a partir de aquí empiezan los condicionales que permiten que el servo se mueva cuando toca
if (cm2<4 && cm>5){ // si la lectura del sensor2 es menor a 4 y a la vez la lectura del sensor1 es mayor a 5
myServo.write(90); //el servo no se abre
digitalWrite(led2,HIGH); //se enciende la luz2 porque no hay más espacio
}
else if (cm2<4 && cm<5) { // si la lectura del sensor2 es menor a 4 y la lectura del sensor1 es menor a 5
myServo.write(90); //el servo no se abre
digitalWrite(led2,HIGH); //se enciende porque no hay más espacio
digitalWrite(led,HIGH); // se enciende porque hay objetos en la barrera
}
// otros casos en los que sí que hay espacio
else if (cm>5){ // si la lectura del sensor1 es mayor a 5
myServo.write(90); //el servo no se abre
delay(1000);
digitalWrite(led,LOW); //el led no se enciende
digitalWrite(led2,LOW); //el led2 de espacio tampoco porque sí que hay espacio
}
else if (cm<5){ //si la lectura del sensor1 es menor a 5
myServo.write(0); //el servo se abre
delay (1000);
digitalWrite(led,HIGH); //el led se enciende porque hay un objeto
digitalWrite(led2,LOW); //el led2 no se enciende porque hay espacio
}
else {
digitalWrite(led2,LOW); // en cualquier otro caso el led2 se mantiene apagado
}
}
//termina el programa
//a continuación se calcula la distancia que hay entre el sensor y el objeto
long readUltrasonicDistance(int triggerPin, int echoPin) //primer sensor
{
pinMode(triggerPin, OUTPUT);
digitalWrite(triggerPin, LOW);
delayMicroseconds(1);
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
pinMode(echoPin, INPUT);
return (pulseIn(echoPin, HIGH)*0.034/2); // imprimirá el valor multiplicado por la velocidad del sonido y dividido entre 2 (porque el sonido va y vuelve)
}
long readUltrasonicDistance2(int triggerPin2, int echoPin2) //segundo sensor
{
pinMode(triggerPin2, OUTPUT);
digitalWrite(triggerPin2, LOW);
delayMicroseconds(1);
digitalWrite(triggerPin2, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin2, LOW);
pinMode(echoPin2, INPUT);
return (pulseIn(echoPin2, HIGH)*0.034/2); // imprimirá el valor multiplicado por la velocidad del sonido y dividido entre 2 (porque el sonido va y vuelve)
}
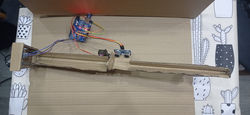
Maqueta
Esta es la idea del montaje. Una pequeña rampa con los dos sensores y el servomotor incorporados. El tamaño de la bajada dependerá del objeto que se quiera utilizar.
 |  |  |
|---|